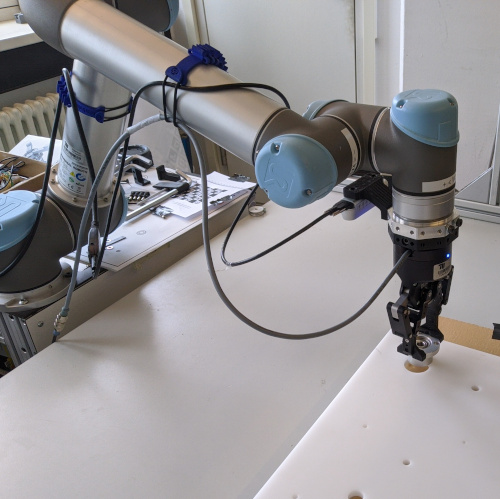
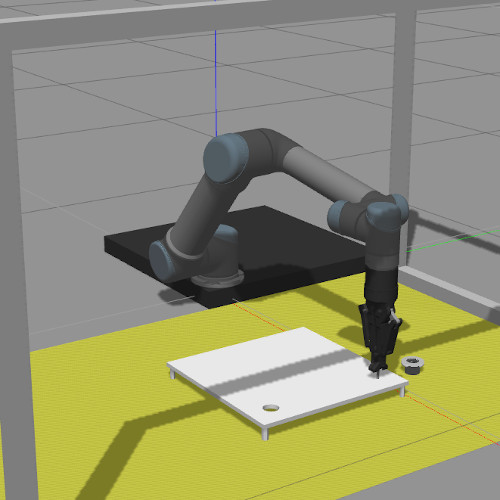
At GitHub you can find my ROS workspace, that contains a fully functioning peg in hole assembly, which only uses force control to find the hole and fit the peg into it. This assembly process works in two environments: In a fully simulated ROS Gazebo environment or in real life using a Universal Robots UR5.
At Thingiverse, I uploaded some of my 3D designs that I feel like sharing and could be useful for others.

At Instagram I posted some pictures of my 3D-Designed objects and tinkering projects that are more design based and I’m specially proud of.
